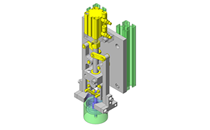
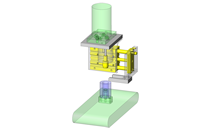
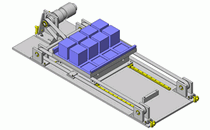
本案例"同时夹持2个工件的机械手",通过1个气缸同时夹紧2种工件。使用连杆,以产生大于气缸推力的夹紧力。定心时使用圆柱形而非球形,以降低加工费。
目的・动作
· 目的 同时对临时组装并未固定的工件α、β进行定位和夹持。
· 动作 气缸伸出,通过气缸和连杆连接的外侧夹具打开,带其他支点的内侧夹具通过气缸前端的滚轮打开。气缸缩回,滚轮脱离内侧夹具,通过弹簧力夹持工件β,通过连杆连接的外侧夹具关闭,夹持工件α。然后,将临时组装的工件α、β转移到固定工序。
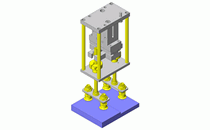
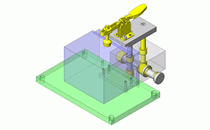
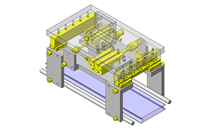
IDEA NOTE1 将气缸运动转换为垂直于轴的方向
通过弹簧转换为相对于各推力方向的垂直方向,进行夹紧。
夹紧工件时,仅使用连杆侧气缸的力,分离工件过程中,弹簧侧使用气缸推力,气缸推力分散的损耗较小

设计要点,尺寸规格等更多案例信息,请点击进入案例详情